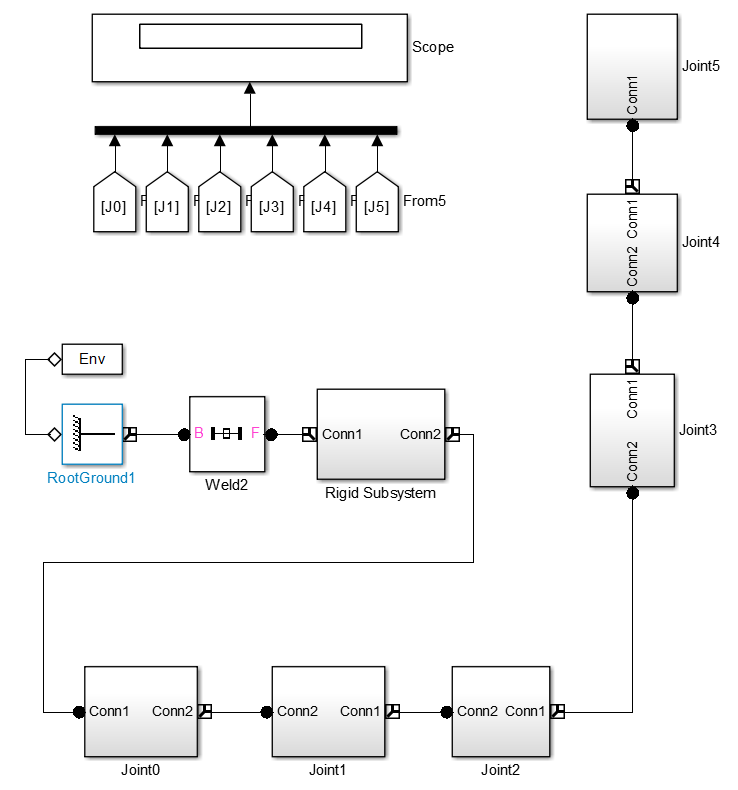
03 — Mechanical Model
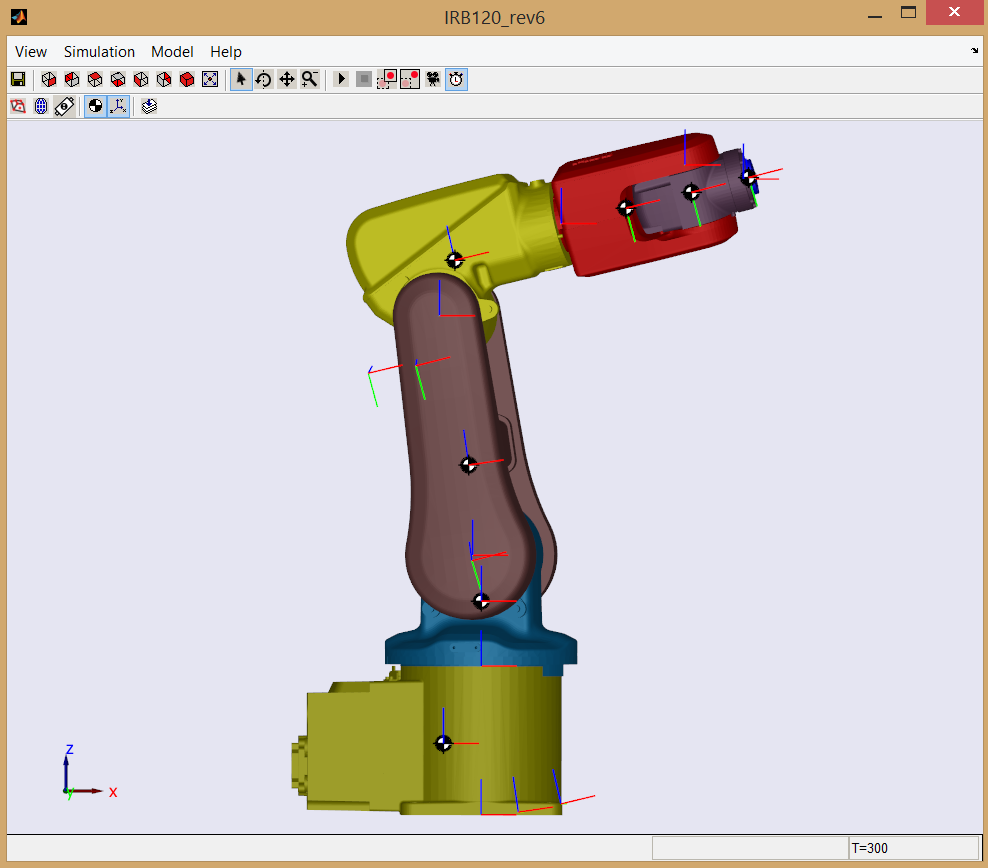
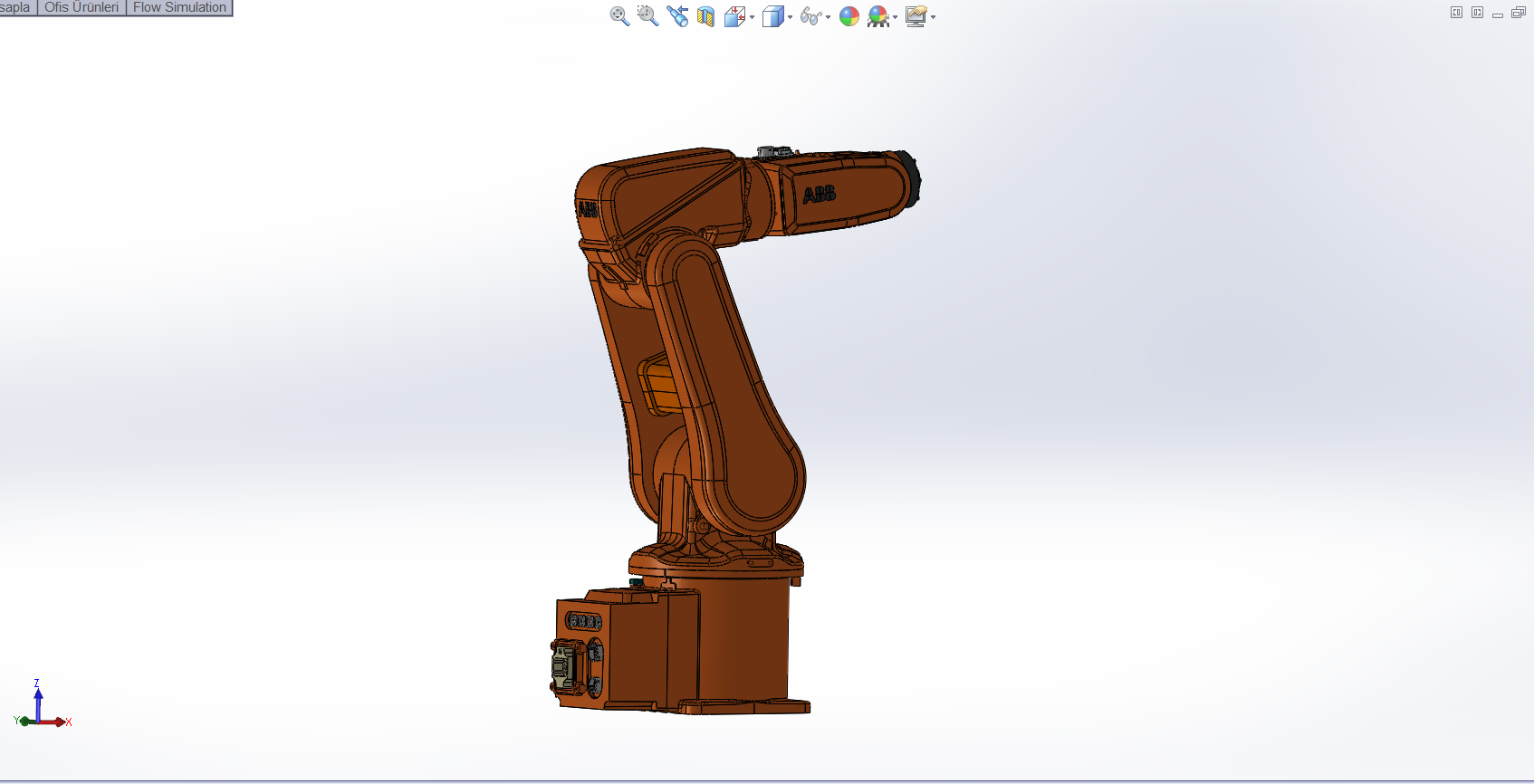
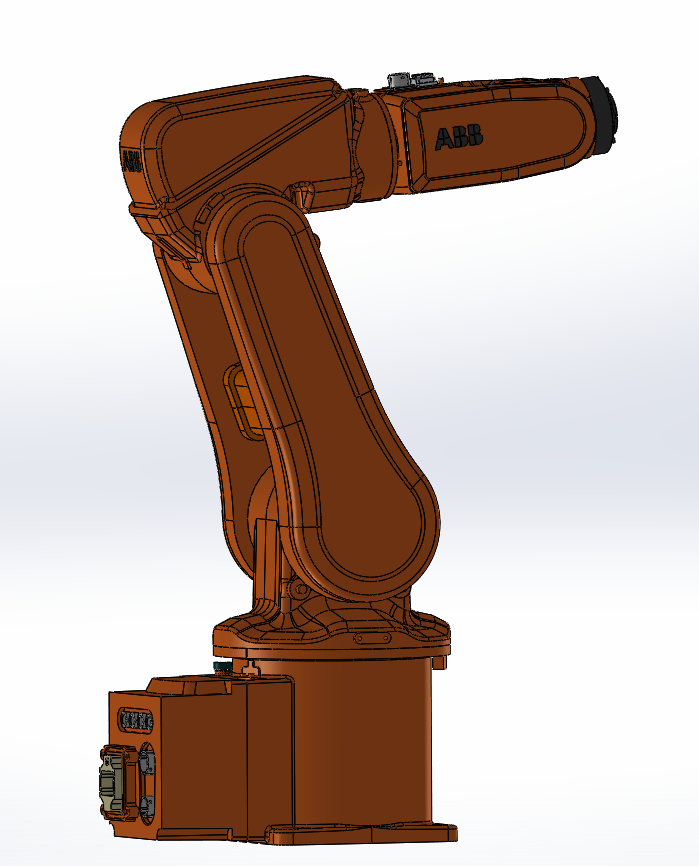
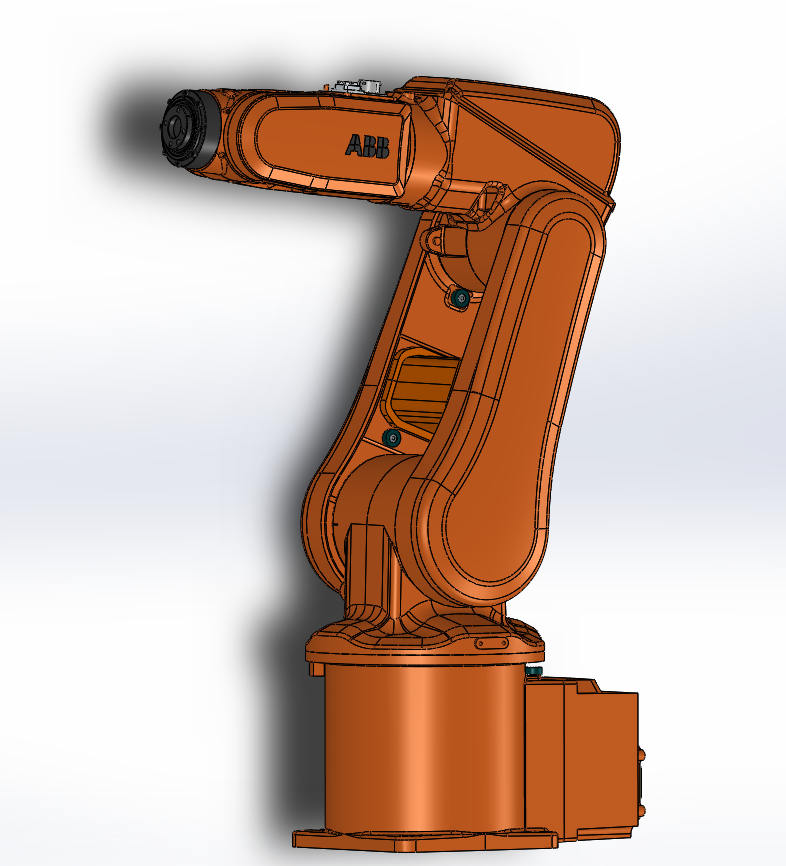
3D robot geometry
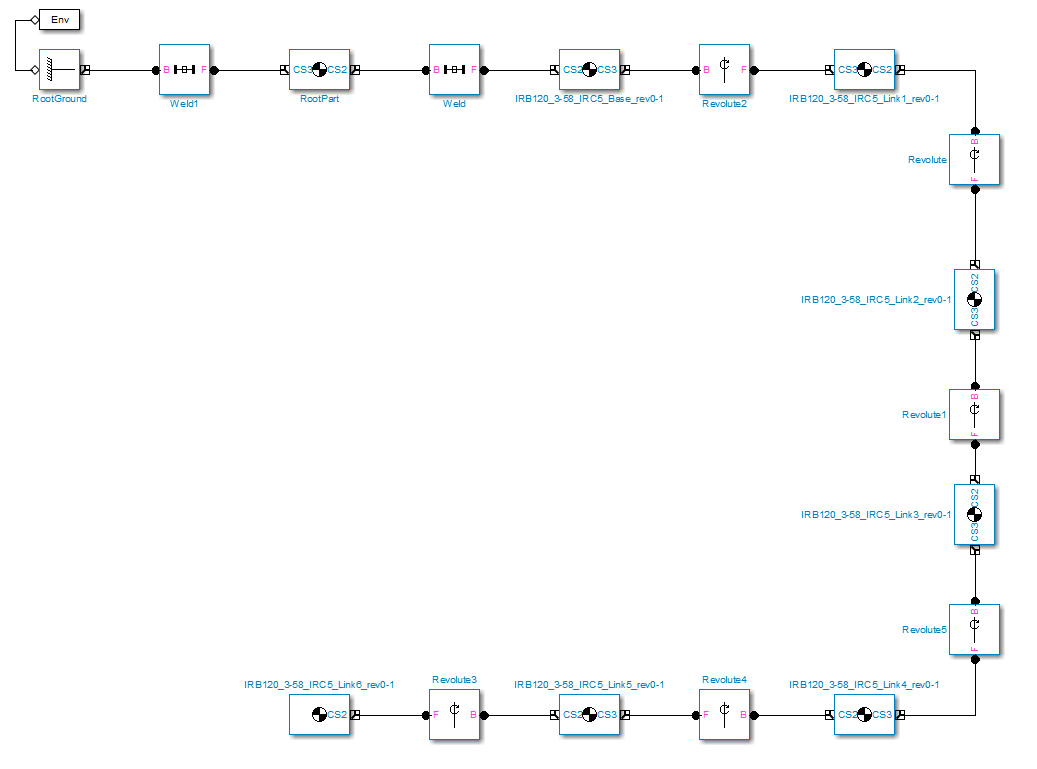
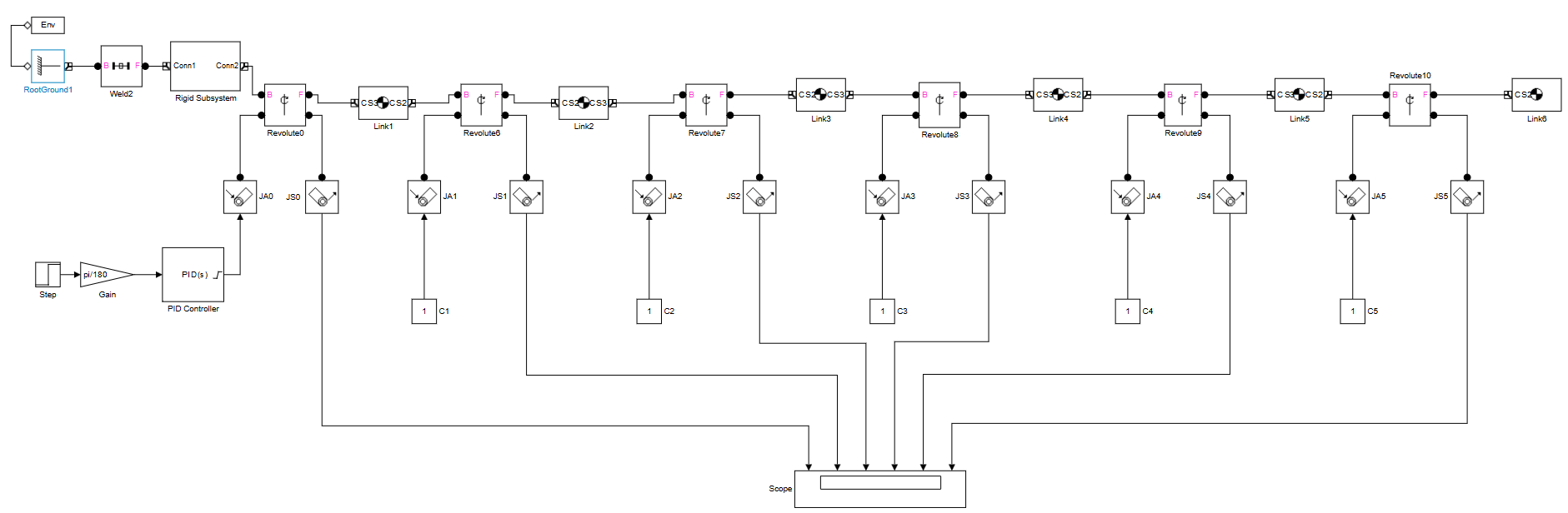
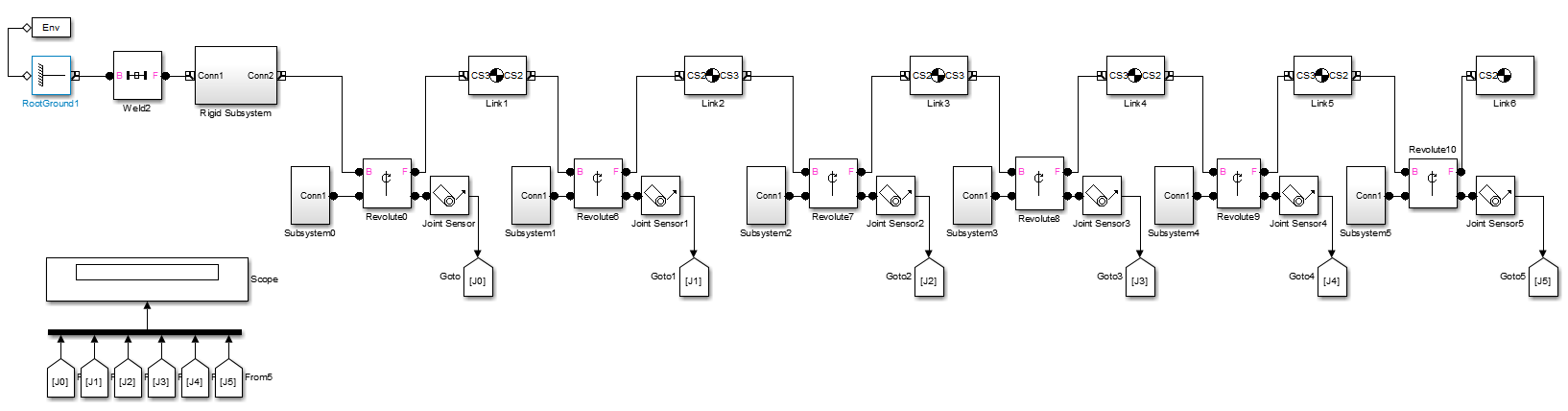
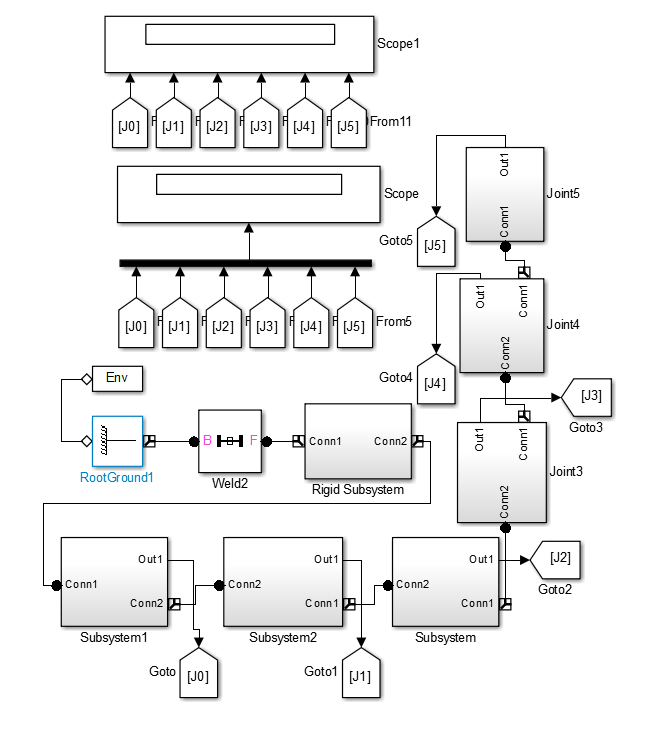
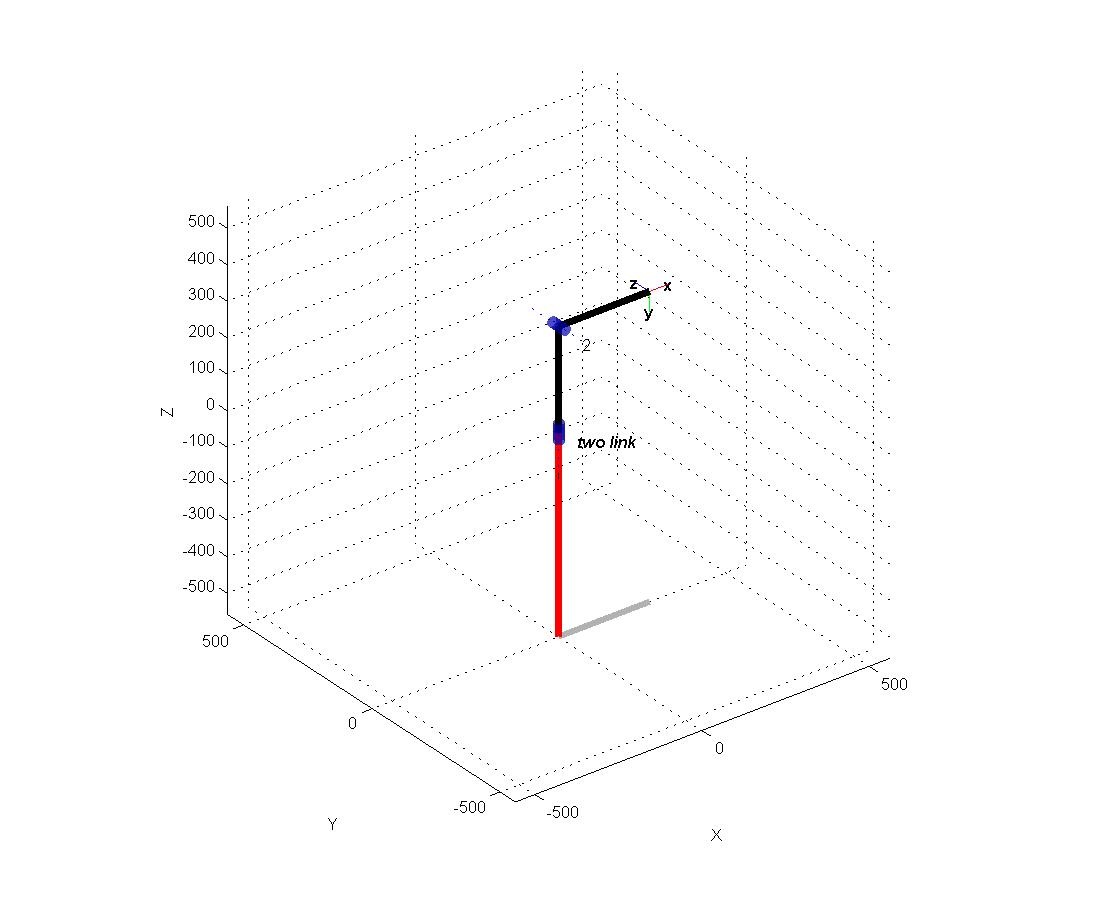
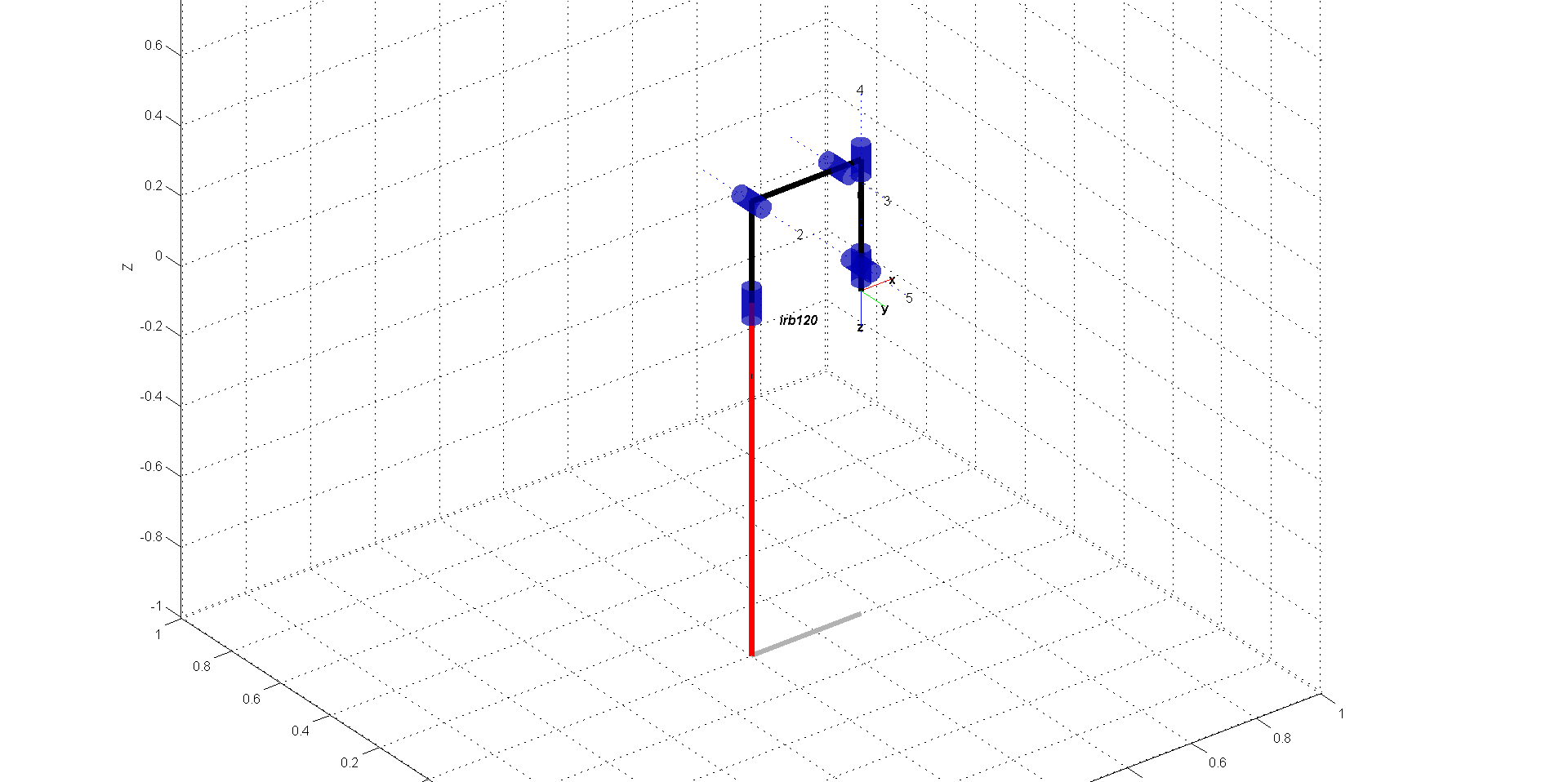
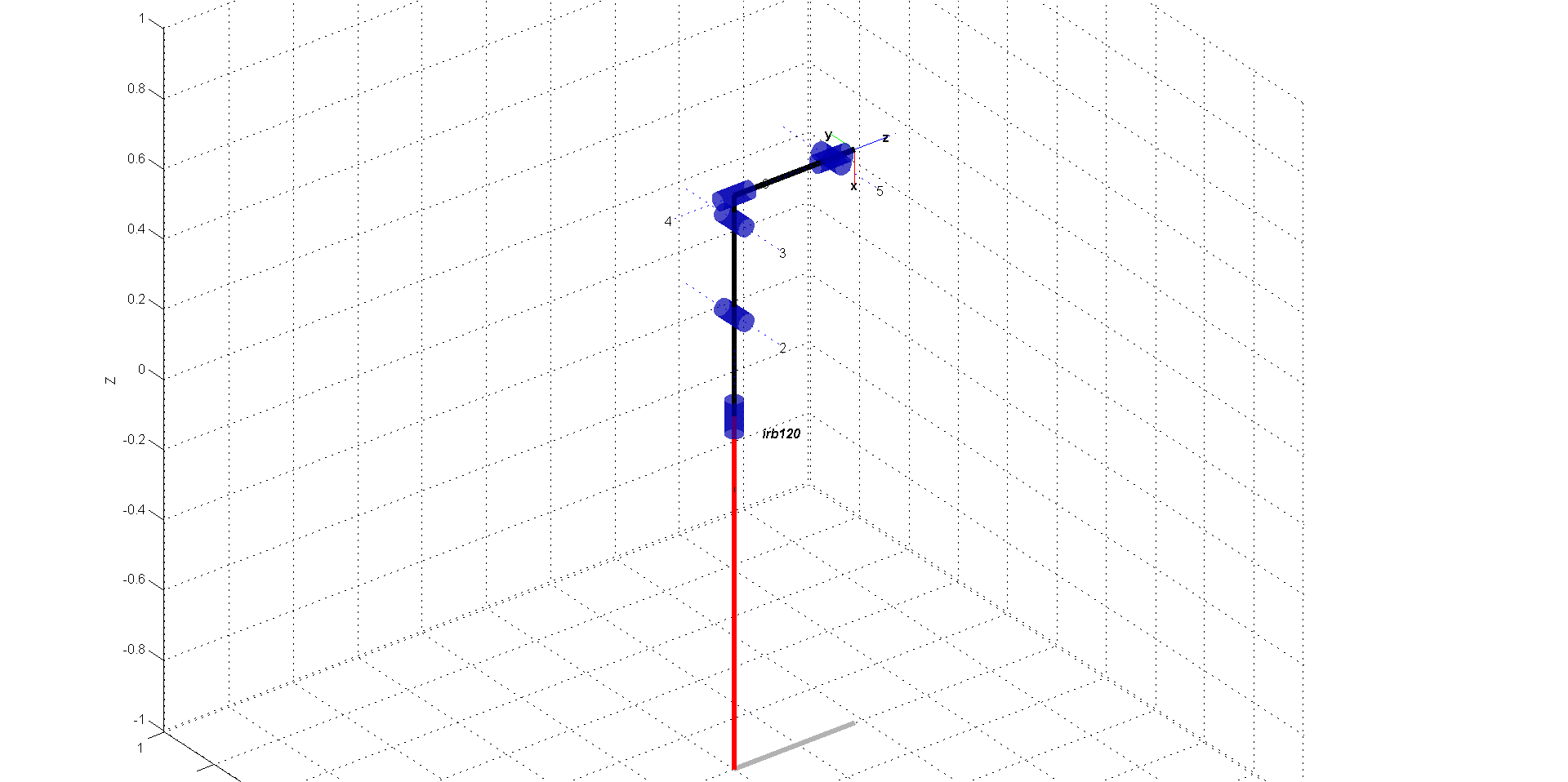
The CAD model was obtained from ABB's official file repository and imported into Simulink's SimMechanics toolbox as STL geometry. Each link carries precise mass and inertia tensors derived from the CAD data. Coordinate frames are assigned at each joint following the DH convention.
Frontal view — zero configuration
Side view
Isometric — link frames
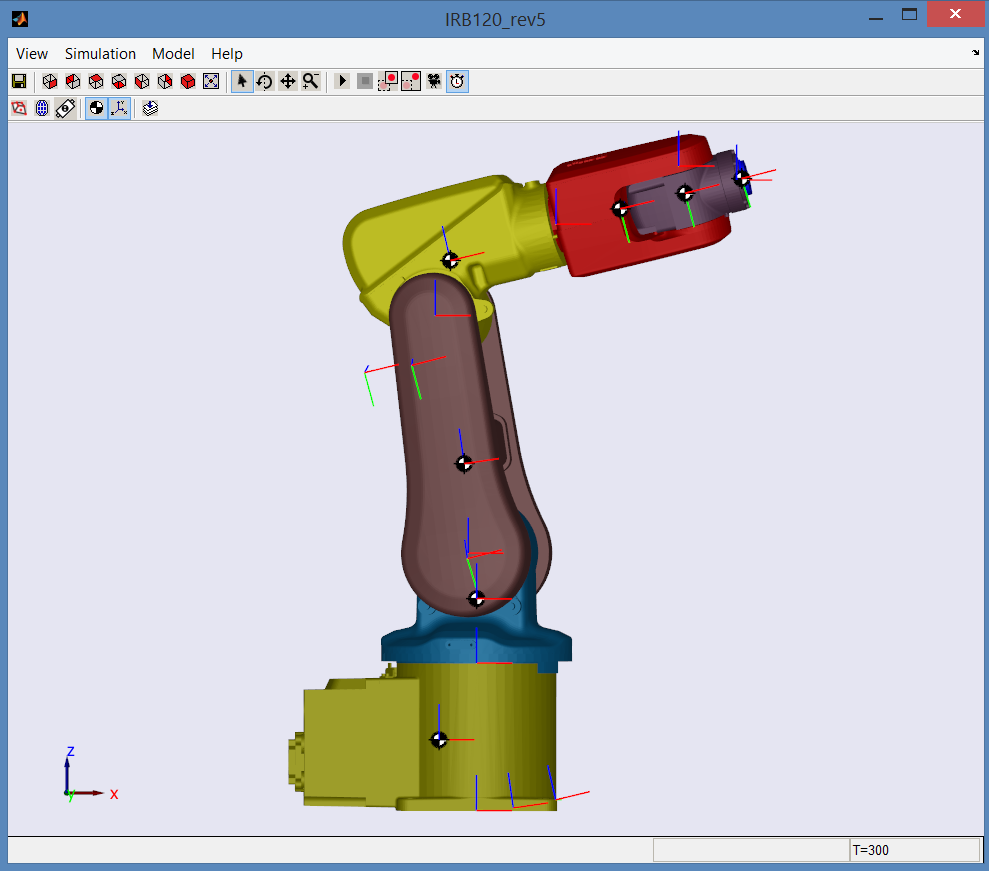
Simulation — initial configuration